




Full Speed Leader 120 PIDs
Index:
Page 1: Review
Page 2: Modding
Page 3: Betaflight
Page 4: Lipo Comparison
Page 5: Videos
Betaflight Settings
The Leader 120 comes with an older Betaflight version, but the version 3.2.x can be flashed without any problems – it requires the firmware OMNIBUS (OMNI) 3.2.x -. Before installing a new version, however, you should make a backup of the original settings on the CLI page of the Betaflight Configurator using the “dump” command. Just to be safe.
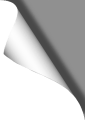
After flashing the firmware, first enable the correct receiver port. In this case UART3:
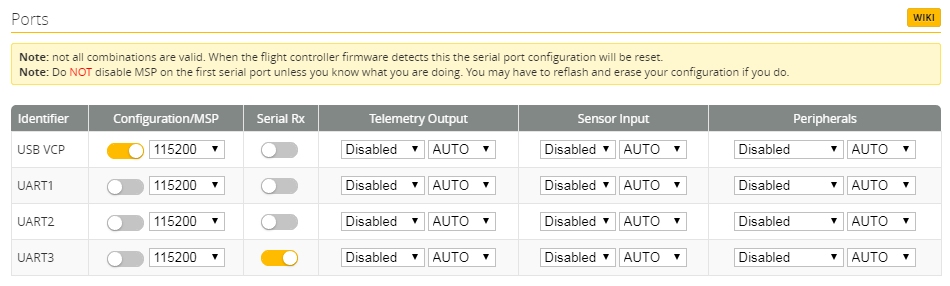
As ESC protocol you should select DSHOT600 and set the gyro update and PID loop frequency to 8 / 2 – 8 / 4 would also work, but at the expense of an increased CPU load. However, since we want to use dynamic filters which needs a a good amount of CPU load on an F3 board, we want to keep the CPU load as low as possible.
Therefore, let’s deactivate all the features that we don’t really need, especially the barometer. The barometer installed on the F3 is not really accurate and quite useless for a racer. So just deactivate it.
If fly in acro mode only, you can also deactivate the accelerator feature. In this case, however, it is no longer possible to fly in stabilized mode. The processor load (to be seen at the bottom of Betaflight) should not exceed 20-30% in idle mode. Then there is enough power for the dynamic filter. With an F4 board you wouldn’t have to worry much about this, but with an F3 the computing capacity is still a bit limited.
Important: on the “Settings” page, the “Dynamic Filter” feature must be activated. That’s what we want to use, so make sure to activate this feature.
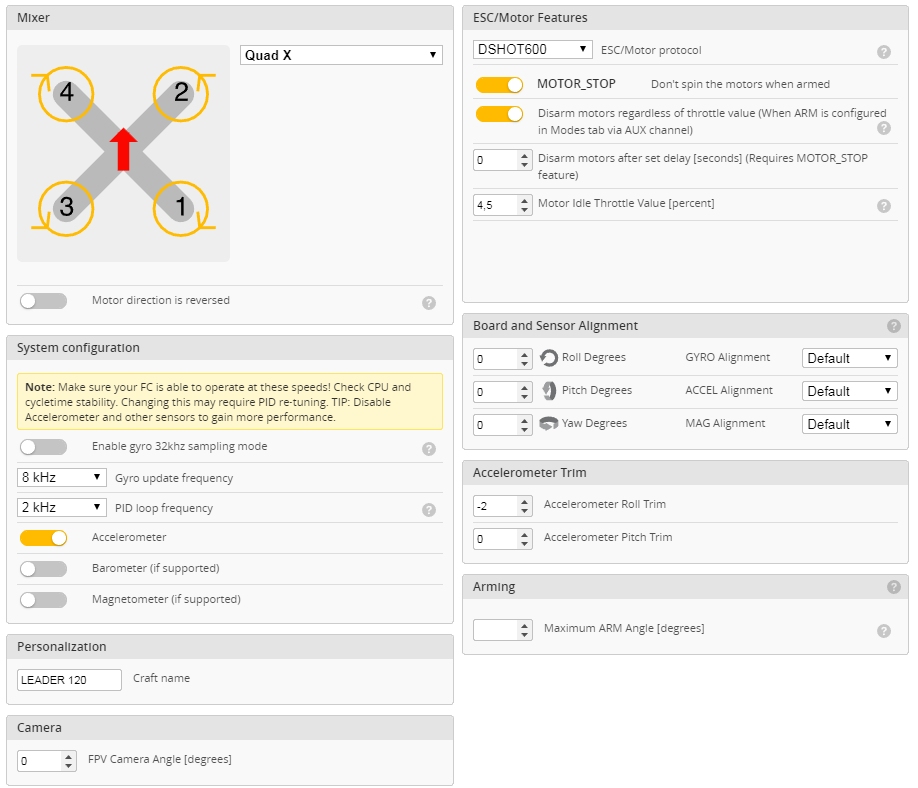
With the standard PIDs of Betaflight 3.2 the Leader 120 performs excellently, so we can leave them as they are for now. I personally prefer quick and crisp rates, but that’s a matter of taste:
Now to the settings of the dynamic filter, which we activated on the “Settings” page. Its settings can be found on the same page as the PIDs, under the “Filter Settings”tab. Change the filter settings there to:

These settings are still moderate, but the Leader 120 doesn’t show any propwashes with them. If you want to optimize even a bit more, you can set “Gyro Notch 1” and “Gyro Notch 2” to 0. Then remember to check the motor temperature on the first flight! So first hover for a few seconds, land again, check the motor temperatures. If they are cold or lukewarm, fly for a minute. Land again and check the motor temperature again. If the engines are still cool, everything is fine.
It is important to note that if the filters are set incorrectly, the motors can overheat very quickly and even burn out! So first check whether they become warm during operation!
Auf der nächsten Seite: Mit welchem Akku fliegt der Leader 120 am besten?
View all articlesArticles in this category
Recent Comments
Leave a Reply
You must be logged in to post a comment.
 SHIRTS & HOODIES
SHIRTS & HOODIES 








































Hey – great review and write-up. Great for noobs like me! I am struggling to find the Nano-tech 2S 850mAh batteries that weigh 49g though… the ones on the Hobbyking site are listed as 95g. Did they used to make a lower C rated version that was lighter?
Paul, see here: http://bit.ly/2sR2epi – 95g is the brutto weight. Netto weight is 49g (just the lipo with the cable), it's written in the description below there.
Doh! I was ordering the battery list by weight:)
Thanks, I'll get a few of those ordered
Will these settings work for a Frsky R-XSR receiver? I can't seem to get my TAranis talking to my receiver.
Thanks
I am using FrSky XM+ with all my micro quads since it is tiny and has full range, plus RSSI. That's all you need while flying with goggles. So I don't know about R-XSR, I'm sorry. There could be several issues: make sure you activated the correct UART in Betaflight and plugged the receiver to the correct pins on the FC. Protocol in Betaflight should be set to SBUS, too. That's the main things to do.
Thanks for that excellent Review!
Are the props suggestion for 2S -3Blade 2840 and for 3S 3025? …besides the originals draw to much amps and seem not available.
Are there further alternatives?
I am using the original props (with 2S and 3S) and they do very well so far. Motors don't get hot (not even warm) with them. However, some Leader owners complain about blackouts or reboots that may happen if the FC board cannot provide enough power for the VTX, RX, LED etc. This seems to be the case if a 200mW VTX is used (which draws more power than the FC's cheap 5V converter can handle). If this is the case, I'd just install a little 5V BEC (Matek, f.e.) that is directly plugged to the battery and powers the VTX, RX and LED. That should provide more stable 5V than the built in converter of the FC board.
Looking to buy the Flightcontroller that came with the leader 120
fired mind but everything is ok so need the FC .Anyone know were I can get and what is the Flightcontroller I need to purchase
Thanks a lot
Love this write up
Generally you should be able to use any F3 / F4 board that fits the frame's screw holes (20x20mm mounting hole distance), so you could chose one that fits your taste. Or even upgrade to a F4.
This one looks very similar though: http://bit.ly/2GlyLdF
Or drop an email to Full Speed and ask them about spare parts.
Thanks for the reply
I am new at this, the one thing I am confuse with is how to power the FC how do you know were 12v is
Thanks
@David – I am not sure what you mean with 12V, so here's a general guide:
Most FC's have a VBAT pin. The VBAT pin is used to power the FC directly from the battery (2S-3S for example, depending on the FC's specs). To power a FC, just connect it's VBAT and VBAT GND directly to the battery contacts -or- to the VBAT / VBAT GND pins of the PCB board.
Some FC's cannot handle full VBAT power. They are powered by 5V only. Then you have to use a power board that provides a 5V output for the FC. The Leader FC (and many other F3 FC's) should be able to handle full VBAT, however. "VBAT" always means full battery power as it comes from the Lipo.
Once the FC is powered, it reduces the full VBAT voltage to 5V (using an on-board module, called LDO) and sends the reduced 5V to all the 5V pins found on the FC board. All these 5V pins on the FC are called the "5V rail". These 5V pins on the FC can then be used to power the camera, VTX or an LED strip. You should keep the number of devices connected to the FC's 5V rail to a minimum, otherwise the FC might get too hot or won't be able to provide enough Ampere for all that devices.
So if your camera or VTX can handle VBAT (full battery voltage), you should connect them to the battery directly to reduce the power load of the FC. Most cams (such as Runcam etc.) and VTX can handle full battery power nowadays.
Hi, kannst du mir sagen wie das Update von Betaflight vonstatten geht? Muss man einen dieser USB Treiber installieren?
@Martin: falls dein Kopter über USB nicht von Betaflight erkannt wird, gibt es zwei Tools, die dir den USB-Treiber installieren: das eine heisst "Zadig", das andere "ImpulseRC Driver Fixer" (Google-Suche). Damit sollte der USB Treiber dann installiert sein. Hier ein Video dazu: http://bit.ly/2EVifkl
Das Update selbst geht dann über die Betaflight App. Diese App musst du im Chrome Browser installieren (Chrome starten, suche nach "Betaflight App" und diese installieren).
Wie man dann in Betaflight updatet, zeigen viele Videos auf YouTube, z.B. hier: http://bit.ly/2nXrhFv
Ist am Anfang recht viel zu lernen, ich weiss. Aber da muss man leider durch ?
Hi Mike, danke für die schnelle Antwort! Der Driver Fixer hat mir weitergeholfen und BF auf den neuesten Stand gebracht!
Lg
??
Hi Mike. Toller Artikel, danke dafür. Leider bekomme ich die Kiste nicht mit meiner QX7 gebunden. Der FrSky Receiver XM+ mit EU/LBT Firmware sollte richtig verkabelt sein. Taranis steht auf D16 Modus. Wenn ich binde, leuchten die rote und grüne LED am Receiver. Nehme ich den Strom weg und wieder dran, leuchtet nur die rote und nicts tut sich
Hast du ein paar Tips für mich?
@Michael: bist du dir sicher, das die passende Firmware auf dem Empfänger installiert ist? Ich gehe immer so vor (allerdings mit der Devo 10, nicht der Taranis):
1. Funke an
2. Bind Button am Empfänger drücken, Akku anschliessen.
3. Funke in den Bindemodus schalten
4. Nach dem Binden Funke und Empfänger ausschalten
5. Dann beide wieder einschalten, die sollten sich dann automatisch finden.
Jo, ich tausche Punkt 2 und 3. Ansonsten mach ich das auch so. Hat auch bis jetzt immer geklappt. Nur bei meinem Leader nicht. Ich denke auch es ist ein Versions Problem. Ich muß mich mal in das Firmware flashen Thema einlesen.
Kurze Rückmeldung nach dem flashen des XM+. Es lag tatsächlich an der falschen Firmware. Vielen Dank für deine Hilfe.
Klasse ??
Hallo Mike,
Auf dem Wiring diagramm steht unten rechts 5v+, bei mir ist dort dort aber vbat angeschlossen. Ist das Diagramm falsch?
Grüße Steffen
Hi Mike,
I bought the Leader 120 based on your review and I'm loving it. I'm using an FrSky R-XSR without any problems. However, I miss the FrSky telemetry and spoken battery alarm I have on my bigger quad. Do you know if the TX1 or TX2 pins on the FC can be used for Telemetry? I'd try it but I'm still quite new at this and have damaged enough electronics through ignorance to be worried about trying it without a good idea it might work.
Thanks
Peter
@Peter: I don't use Taranis myself, so I can't help you with this. I am using the Devo10 and FrSky XM+ with all my micro quads. The XM+ receiver has RSSI, which can be displayed in the goggle's OSD, as well as the voltage and mah consumption, so (in my opinion) there is no need for Taranis telemetry anymore in the days of Betaflight OSD.
Hello, friend! Is it possible to set up a beeper to search for a quadcopter? I tried to set up a betaflight nothing happens..((
Why the Max Vel Deg/s of yaw is bigger, despite the rates of pitch, roll and yaw are equal?