




EMAX BABYHAWK-R
Inhalt:
Page 1: Review
Page 2: Betaflight Setup
Page 3: Adding LED Strip
Betaflight Setup of the Babyhawk-R
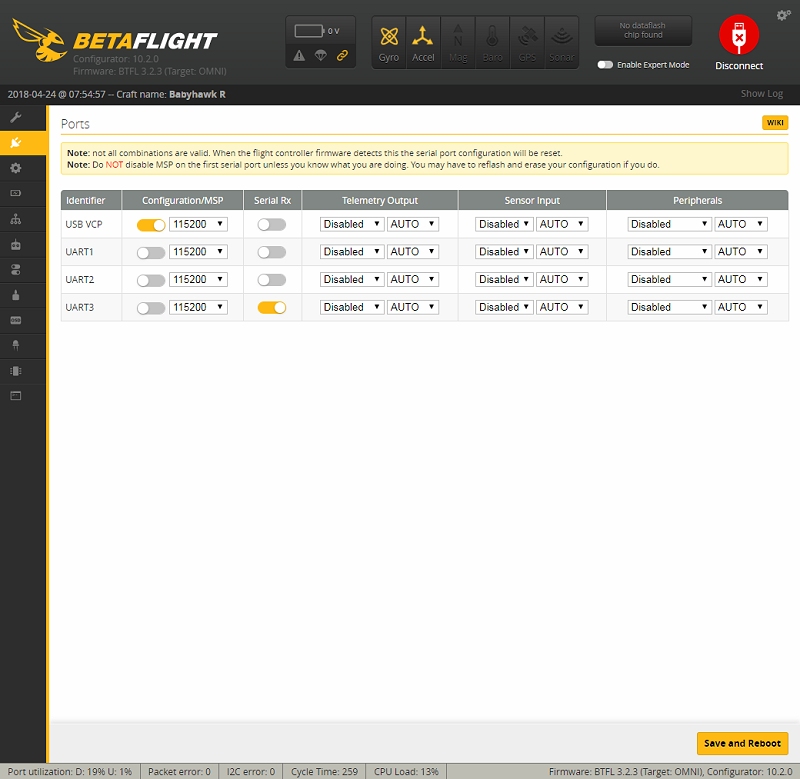
Our Babyhawk-R (3 inch version) came with pre-installed Betaflight 3.2.3. On the “Ports” page, “UART3” should be activated:
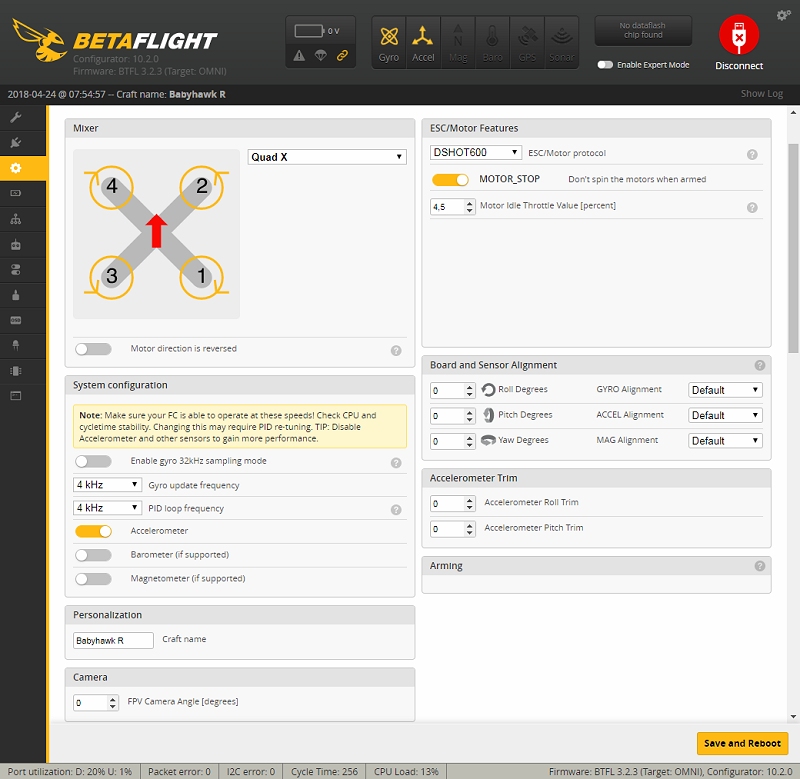
On the “Settings” page you can set the “Motor Idle Throttle” value a little higher (e.g. to 6.5), if the motors of the Babyhawk stutter from time to time in the air or if it just falls from the sky during flips or rolls. Usually “Idle Throttle” is then set too low and especially with small, high KV motors a slightly higher value is recommended.
“Gyro” and “PID loop frequency” are set to 4 kHz by default. We can leave it that way. We can safely deactivate barometers, which saves valuable processor power. You can activate or deactivate “MOTOR_STOP” depending on your personal preference:
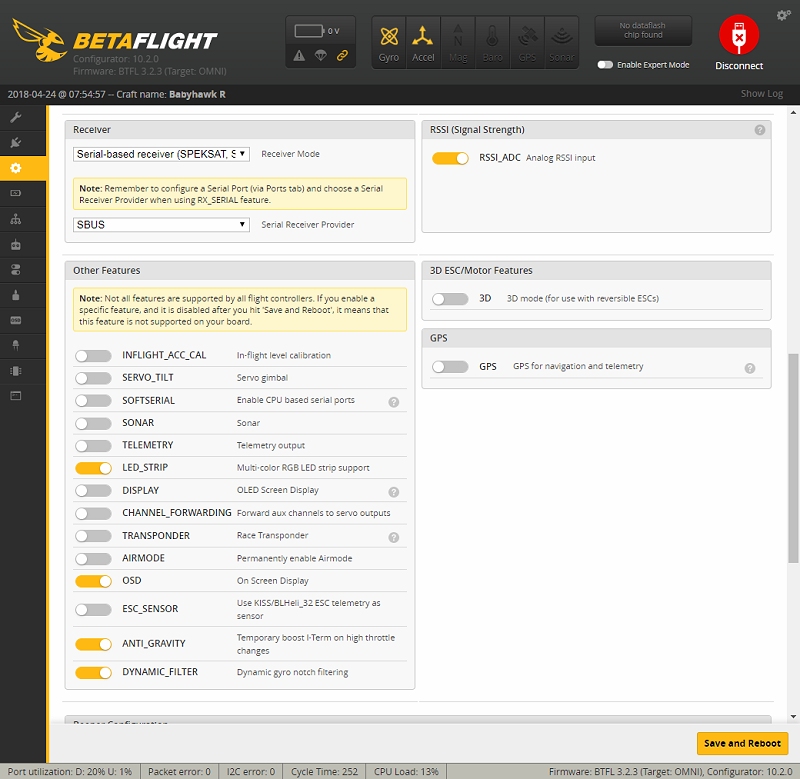
In our case a FrSky XM+ receiver is installed, which is why we set “Receiver” to “Serial-based” and select “SBUS”. We can activate RSSI (indication of the reception strength in the OSD), because the XM+ supports this. Under “Features” we activate “LED Strip” (if one is installed), “OSD”, “Anti_Gravity” and (important!) “Dynamic_Filter”. Depending on your personal preference, you can also activate “Airmode” here:
The beeper configuration:

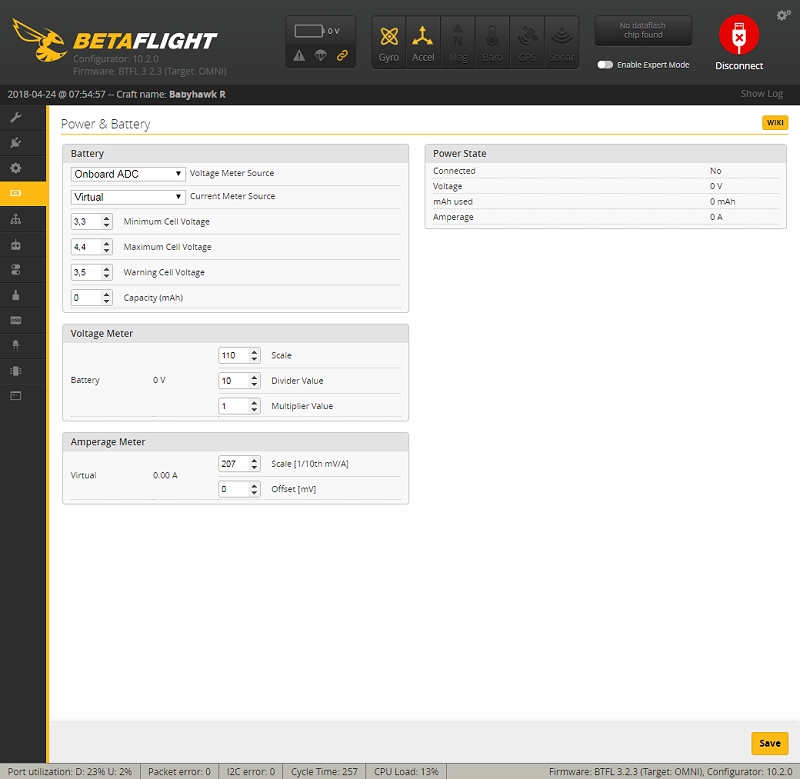
Here are the Voltage Settings. “Voltage Meter Source” is set to “Onboard ADC”, the “Current Meter Source”, which displays the consumed mAh in the OSD, is set to “Virtual”, otherwise it will not work correctly. Under “Amperage Meter” below we have to enter a correct scale value, so that the display of the consumed mAh in flight corresponds to the actually consumed mAh. With 3S Lipos this is about “207”. If the display of the mAh consumed in flight is too high, you have to decrease this value, if it is too low, you have to increase the scale accordingly. You can find out this value simply by flying with a full battery and then writing down how much mAh you have used according to the OSD. At home, fully charge the battery again and look at your Lipo charger how much mAh were loaded into the battery:
The pre-tuned PIDs of the Babyhawk-R work well, there is no need to change them yet. The rates (stick sensitivity) are up to your personal desires:

Dynamic filters are already activated for the Babyhawk. Only the D Term Notch filter is still activated, and that’s a good thing – because with the D Term Notch filter deactivated, the engines can run hot and eventually burn out, even if only one propeller is bent and causes stronger vibrations. That’s why we always leave this filter active on our quads. Emax has also chosen this safer option and that’s okay:

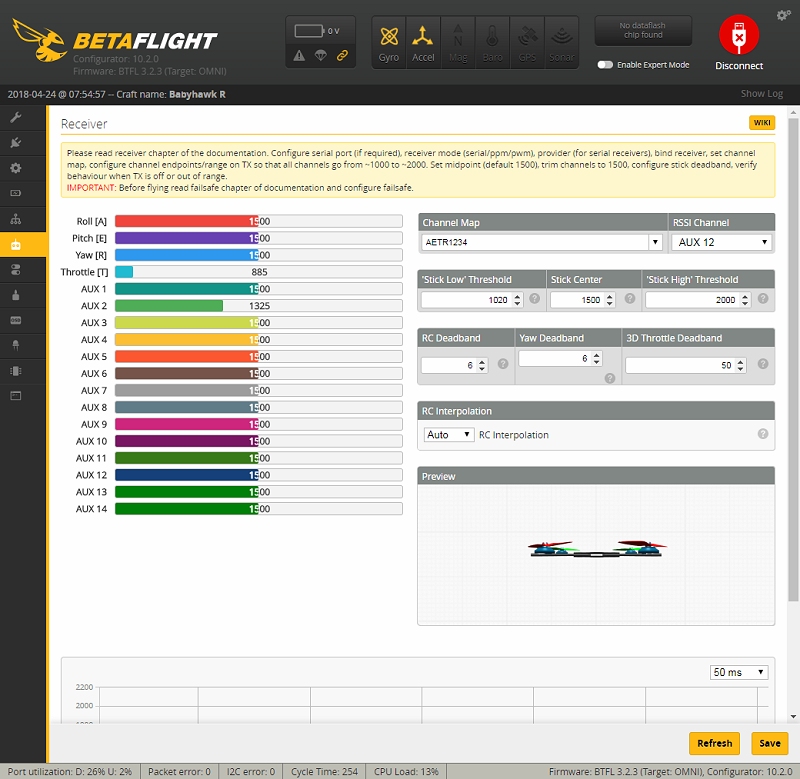
On the Receiver page we make sure that the order of the channels (channel map) is correct. This can vary depending on the profile setting on your remote control. In our case we set them to “AETR”. Since we use an XM+ receiver with RSSI, we have to enter on which channel the RSSI signal is received. This is usually always the last channel of the receiver. Since our XM+ is a 16-channel receiver, we enter “AUX12” here. This is the 16th (last) channel (4 control channels + 12 aux channels = 16):
The modes are set as follows in our case. It is important to have the flight mode (Angle, Horizon, Acro) on one switch. In addition, the beeper should be switchable on and off and the LED strip (if there is one installed) can also be conveniently switched on and off by a switch:
On the next page: Adding a LED strip to the Babyhawk-R.
View all articlesArticles in this category
Recent Comments
Leave a Reply
You must be logged in to post a comment.
 SHIRTS & HOODIES
SHIRTS & HOODIES 







































Hello,
I have the babyhawk R 112m by emax and i am confused as i dont know which FPV app i need to view the live videos fron hawk as it travels or do i not need sn app.
Hi, I think you should buy FPV goggles, because all "real" FPV are using analog transmission over 5.8 GHz (babyhawk does). So if you would like to use your tablet or phone (bad idea because of video latency) you should check banggood and look for "USB fpv" device. But it's way better to fly with goggles – even cheap one.
Right. Most racing drones use ANALOG video transmission on the 5.8GHz band. There are dozens of 5.8GHz video goggles available (Fatshark, Eachine, Aomway etc). Camera drones, in contrast, are mostly using DIGITAL video transmission which requires a smartphone app. DIGITAL video transmission is not useful for racing drones because of the noticeable lag (150 milliseconds or more). This is why racing drones all use ANALOG video transmission (no apps – just an analog FPV goggle required).
Vielen Dank für das tolle Review. Aufgrund dieses Tests habe ich mich auch für diesen kleinen Racer entschieden.
Und ich bin begeistert!
Leider hat aber der LED-Mod nicht so richtig funktioniert bei mir. Also eigentlich hat alles funktioniert, aber das Videobild hat ganz verrückt geflackert sobald ich die LED eingeschaltet habe. Ich habe das selbe LED-Board wie hier benutzt. Hattest du das gleiche Problem?
Es könnte sein, daß das Flight Controller Board des Racers nicht mehr genug Strom für den Videosender bereitstellen kann, sobald die LEDs als Verbraucher mit angeschlossen sind – dieses Problem haben viele Minis, vor allem wenn der VTX auf die höchste Sendestufe gestellt ist. Die 5V Schiene der Boards liefert meist nur ~1A, was für Empfänger, Videosender, Kamera, Board und LEDs dann doch sehr knapp ist.
Um dieses Problem zu umgehen, installiere ich bei allen Minis grundsätzlich einen 5V BEC (z.B. der von Matek: https://bit.ly/2Rwjyfs ). Der wird einfach an die Lipokontakte des Racers gelötet und liefert dann genug Ampere für alle benötigten Komponenten.
Hi,
toller Blog!
Wie hast du den LED Strip im Betaflight prgrammiert?
Die leuchten bei mir nur gelb, egal was ich einstelle und zuweise.
Gruß
Rallef
Rallef, hast du den Data Pin des LED Strips mit dem LED Data Pin des Flight Controllers verbunden? Dann sollte es eigentlich funktionieren.
hi, hab den fehler, die V4 der Betaflight macht die LEDś nicht mehr
gruß